Lidar point cloud on the web with trame
LidarView is an open source application developed by Kitware based on ParaView and enabling live 3D sensor reading, recording and processing from multiple vendors.
trame, is a python based framework developed by Kitware to easily create web applications for visual analytics by leveraging python libraries and with a client-server mechanism.
Combining both opens the door to new types of usage and user experience with LiDAR sensors. You can now share a no-install web interface for your point cloud processing pipelines, remotely render live visualizations seen by a LiDARs sensor without the need to transmit the whole point cloud from the server to the client ( i.e. web browser).
If you have a robot/drone with a mounted LiDAR sensor, you can visualize in real time what it sees and trigger processes directly from a web page.
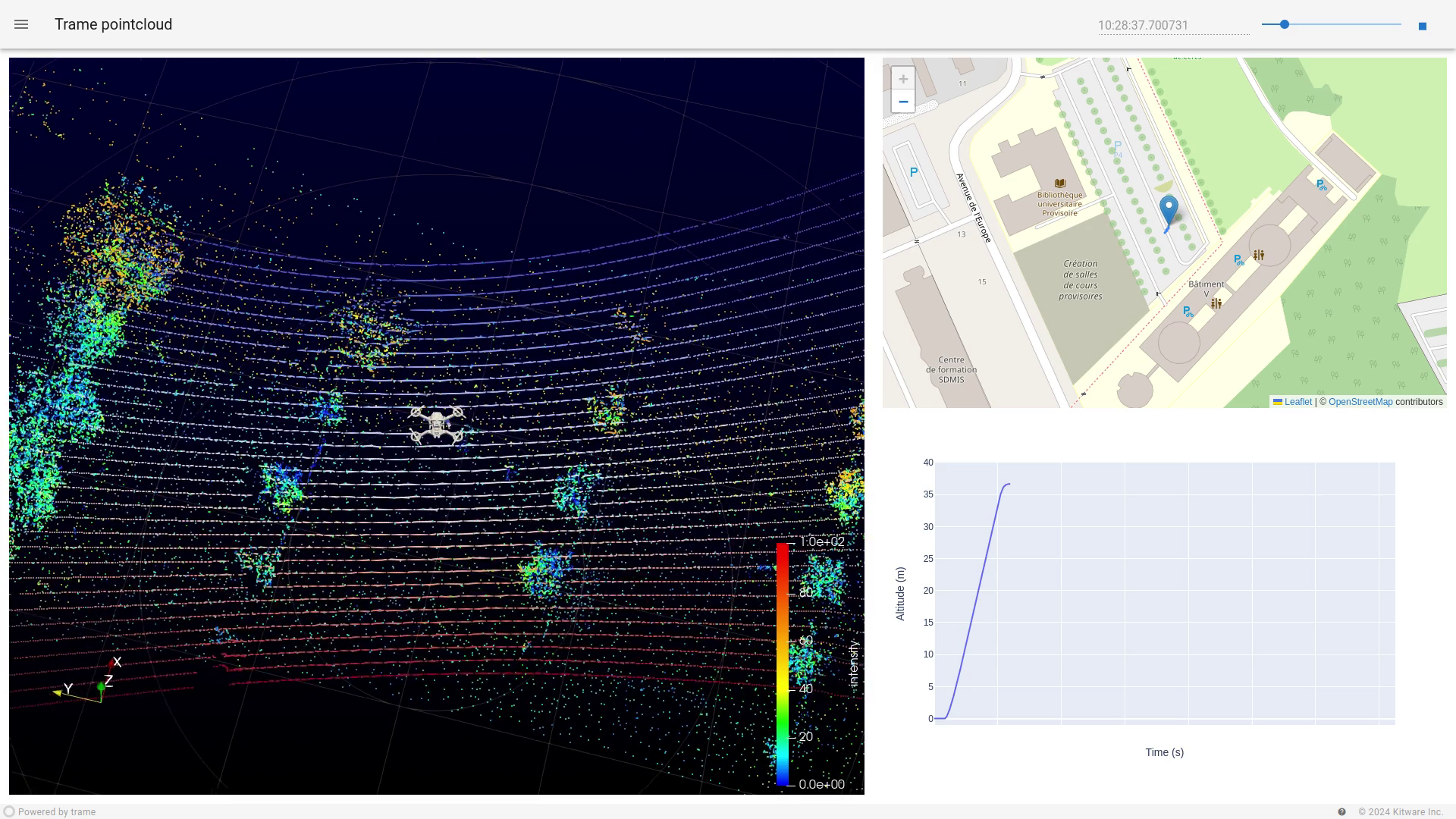
A trame-based LidarView web application (video accelerated for best effect)
A few months ago, we exposed LidarView onto the web with ParaView Web. We recently improved the demo to extend its usage and capabilities. By using trame, we created a web viewer that remotely renders a LiDAR point-cloud while adding more types of visualization (a map with Leaflet and a chart with Plotly). The point-cloud is registered in real-time using LidarView’s SLAM algorithm.
The web application is 100% Python code and internally calls LidarView and ParaView Python functions.
Reach us out if you want to know how you can bring your point-clouds onto the web.