TeleSculptor 1.1 Released
We are please to announce that TeleSculptor version 1.1 has been released. TeleSculptor is a cross-platform (Windows, Linux, Mac), open source desktop application for photogrammetry. It was designed with a focus on aerial video, such as video collected from UAVs. The software takes an aerial video observing a target location and builds a 3D model of that location. The example below uses the VIRAT Video Dataset, and you can download this video to try out TeleSculptor. Check out the user guide for detailed instructions.
What’s New
This release comes about a year after the first production release of TeleSculptor, version 1.0, in 2019. Since then we’ve made numerous improvements to the capabilities and the performance of the algorithms. Specifically, the most prominent features of this new release are
- Improved robustness in structure-from-motion
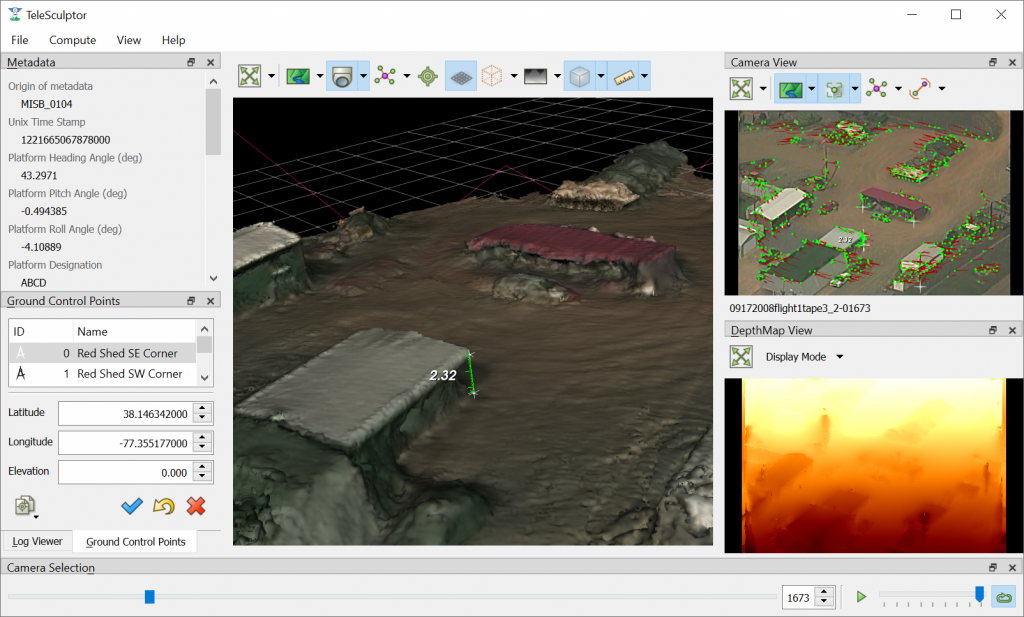
- An option to use ground control points to geo-register a solution
- A logger panel to show log messages from the algorithms
- Improved spatial distribution of tracked features
- Improved video loading
- A “Run End-to-End” compute option
The team has also made many more improvements, which are documented in the release notes. The video below shows a glimpse of TeleSculptor in action, which highlights some of these changes.
While TeleSculptor provides a user interface for aerial photogrammetry, the broader KWIVER toolkit houses TeleSculptor’s algorithms to allow for easier developer access. KWIVER makes use of various third party open source libraries, and the Fletch project provides CMake infrastructure to make sure all of those packages build in a common environment and consistently across platforms. TeleSculptor v1.1 builds against the recently released KWIVER v1.5 and Fletch v1.4.
Getting Involved
If you are interested in TeleSculptor but need additional help, please contact us. Kitware offers advanced software R&D solutions and services. If you would like to join us in the development of TeleSculptor, please reach out on Github. TeleSculptor is highly reconfigurable, and we aim to build an open community of both developers and users.